
{kind=link}
井眼轨迹模式定量识别方法
[刘修善 ]
]
]
|
|


作者简介:刘修善(1962-),男,黑龙江牡丹江人,博士,中国石化石油工程技术研究院教授级高级工程师,主要从事导向钻井工艺、井下信息测量与控制等方面的研究工作。地址:北京市朝阳区北辰东路8号北辰时代大厦9层,中国石化石油工程技术研究院,邮政编码:100101。E-mail:liuxs.sripe@sinopec.coma
为了准确计算实钻轨迹,提出了井眼轨迹模式定量识别方法,并进行实例分析。随钻测量数据可以提供井斜角、方位角以及工具面角的实测值,据此提出利用工具面角来识别井眼轨迹模式的技术思路。根据导向钻具的定向造斜机理建立了适用所有井眼轨迹的工具面角方程,结合各种井眼轨迹模型的特征参数便可计算工具面角理论值。评价工具面角理论值与实测值之间的误差,可优选出最符合实际的井眼轨迹模型。井眼轨迹模式识别提供了测斜计算方法的定量评价指标和选用依据,可避免主观和随意选用测斜计算方法等问题,从而能提高井眼轨迹的监测精度及可靠性。
In order to accurately calculate drilled trajectories, method of quantitatively recognizing borehole trajectory models was provided, and case analysis was conducted. Because the measurement-while-drilling data provide with measured values of tool-face angle besides inclination angle and azimuth angle, this paper presents the technological approach of recognizing borehole trajectory models based on tool-face angle. A universal tool-face angle equation was established based on the directional deflection mechanism of steerable drilling tools, and it can calculate the tool-face angles with characteristic parameters of various borehole trajectory models. Then, by evaluating the error between the theoretical value and the measured value of tool-face angle, the trajectory model most consistent with the actual well trajectory can be selected. The model recognition of borehole trajectory provides with the quantitative evaluation index and selection basis of survey calculation methods, which can avoid subjectively and randomly selecting the survey calculation method, and consequently improves the monitoring accuracy and reliability of borehole trajectory.
定向钻井的关键技术是井眼轨迹设计、监测和控制, 其中井眼轨迹监测的基本任务是基于测斜数据计算实钻轨迹。由于测斜时只能获得一系列离散测点处的井深、井斜角、方位角等基本参数, 无法还原各测段内井眼轨迹的真实形态, 所以需要基于假设条件和数学模型来计算井眼轨迹的空间坐标、弯曲及扭转形态等参数。然而, 各种假设条件使得测斜计算方法具有多样性, 导致现存测斜计算方法就有20余种[1, 2, 3]。
显然, 不同测斜计算方法所得的结果不同, 究竟哪种测斜计算方法更符合实际, 目前只有定性结论[3, 4], 没有定量的评价指标和选用依据。尽管中国行业标准推荐使用最小曲率法、圆柱螺线法和自然曲线法3种测斜计算方法[5], 但是都存在较大的主观性和随意性。
本文基于工具面角理论值与实测值之间的误差, 提出了测斜计算方法定量评价指标。通过建立普遍适用的工具面角方程, 计算各种井眼轨迹模型条件下的工具面角。根据随钻测量所获得的工具面角实测值, 采用评价指标便可优选出最符合实际的井眼轨迹模型, 从而形成井眼轨迹模式定量识别技术。
虽然无法知道实钻轨迹的真实形态, 不能建立完全符合实际的井眼轨迹模型, 但是可以基于测斜数据来评价现有的井眼轨迹模型, 从中筛选出最优者, 以提高井眼轨迹的监测精度及可靠性。
井眼轨迹监测的基本任务是:通过一系列离散测点的井深、井斜角、方位角等基本参数, 计算出北坐标、东坐标、垂深、水平位移等空间坐标以及井斜变化率、方位变化率、井眼曲率等挠曲参数。在钻井过程中, 利用随钻测量仪器无法测得井眼轨迹的空间坐标和挠曲参数, 但可以测得工具面角。因此, 通过评价工具面角理论值与实测值之间的误差, 可筛选出最符合实际的井眼轨迹模型[6]。
目前, 通常采用同一种测斜计算方法来监测全井的井眼轨迹。实际上, 为提高计算精度, 还可根据不同的钻井工具、工艺及地质分层等, 将全井划分为若干个井段并分别采用不同的测斜方法计算。根据井眼实际情况和需求, 可分别按全井和不同井段来识别井眼轨迹模式, 井眼轨迹模式识别方法基本相同。
对于含有n个测段的井段, 把工具面角理论值与实测值的平均绝对误差e作为井眼轨迹模式识别的评价指标, 即
$e=\frac{1}{n}\sum\limits_{i=1}^{n}{\left| {{\omega }_{i}}-{{\Omega }_{i}} \right|}$ (1)
显然, 在任一测段[Li-1, Li] (i=1, 2, …, n)上, 不同井眼轨迹模型算得的工具面角理论值不同, 所以不同井眼轨迹模型算得的平均绝对误差也不同, 其中平均绝对误差最小者便是最符合实际的井眼轨迹模型。
为合理使用上述的井眼轨迹模式识别方法, 应注意以下问题:①每个测段的上下两测点都有工具面角的实测值, 应使用同一个测点的工具面角理论值与实测值进行计算, 但不同测段可选用不同的测点。②每个测点有相邻的上下两测段, 在计算工具面角理论值及误差时, 测点与测段也应保持一致。③在每个测段上, 不能随意选取上测点还是下测点进行模式识别, 应依据工具面角的实测值来确定。当实测工具面角为该测段的初始定向数据时应采用上测点, 当实测工具面角为随钻至下测点的数据时应采用下测点。④由于工具面角为周期性参数, 所以绝对误差不能简单地通过工具面角理论值与实测值之差来计算, 应采用二者之间的净误差。因此, 井眼轨迹模式识别的评价指标不采用工具面角理论值与实测值之间的相对误差。例如, 假设工具面角的理论值和实测值分别为358° 和4° , 则二者之间的绝对误差应为6° 而不是354° ; 在工具面角理论值与实测值之间的绝对误差为6° 时, 若实测值为358° 则相对误差为1.68%, 若实测值为4° 则相对误差为150%。
要从现有井眼轨迹模型中筛选出最优者, 需要计算各种井眼轨迹模型的工具面角理论值, 然后基于(1)式的评价指标实现井眼轨迹模式识别。然而, 现有工具面角公式以空间圆弧轨迹为前提, 只适用于井眼轨迹的空间圆弧模型, 不适用于其他井眼轨迹模型, 因此必须建立普遍适用的工具面角方程。
工具面角用于表征造斜工具的工作姿态, 是造斜工具的工具面与井斜平面之间的夹角(见图1)。为表征造斜工具的定向方向, 在井底点P处建立井眼坐标系P-xyz。其中, x轴位于井斜平面与井底平面的交线上, 指向增井斜方向, 用单位向量ex表征; z轴指向井眼轨迹的前进方向, 用单位向量ez表征; y轴垂直于x轴和z轴, 三者构成右手坐标系, 用单位向量ey表征。
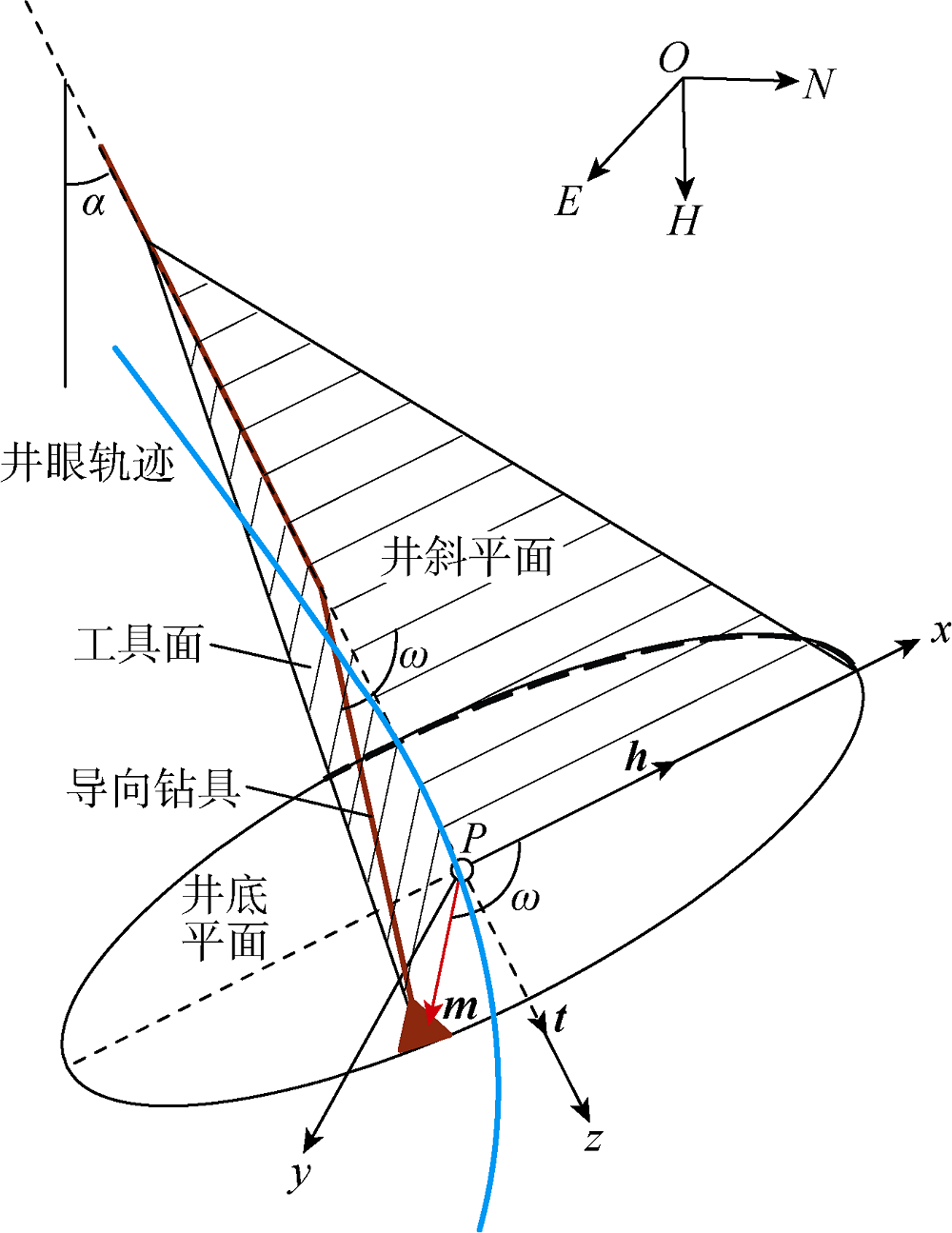 | 图1 工具面角及定向方向示意图 |
由于单位向量ez指向井眼轨迹的切线方向, 单位向量ex指向井眼高边方向, 进而可按右手法则确定单位向量ey, 所以在井口坐标系O-NEH下这3个单位向量可表示为[7, 8]:
$\left\{ \begin{align} & {{e}_{x}}=\cos \alpha \cos \phi \, \mathbf{i}+\cos \alpha \sin \phi \, \mathbf{j}-\sin \alpha \, \mathbf{k} \\ & {{e}_{y}}=-\sin \phi \, \mathbf{i}+\cos \phi \, \mathbf{j} \\ & {{e}_{z}}=\sin \alpha \cos \phi \, \mathbf{i}+\sin \alpha \sin \phi \, \mathbf{j}-\cos \alpha \, \mathbf{k} \\ \end{align} \right.$ (2)
在工具面与井底平面交线上, 从井眼中心指向钻头的方向表征了造斜工具的定向方向(见图1), 因此工具面角也是定向方向与井眼高边方向之间的夹角。据此, 造斜工具的定向方向可表示为:
$\mathbf{m}=\left( \cos \alpha \cos \phi \cos \omega -\sin \phi \sin \omega \right)\, \mathbf{i}+$
$\left( \cos \alpha \sin \phi \cos \omega +\cos \phi \sin \omega \right)\, \mathbf{j}-\sin \alpha \cos \omega \, \mathbf{k}$ (3)
业已证明, 造斜工具的定向方向与井眼轨迹的主法线方向一致[8], 而井眼轨迹主法线方向上的单位向量可表述为[1, 2]:
$n=\left( \frac{{{\kappa }_{\alpha }}}{\kappa }\cos \alpha \cos \phi -\frac{{{\kappa }_{\phi }}}{\kappa }\sin \alpha \sin \phi \right)\, \mathbf{i}+$
$\left( \frac{{{\kappa }_{\alpha }}}{\kappa }\cos \alpha \sin \phi +\frac{{{\kappa }_{\phi }}}{\kappa }\sin \alpha \cos \phi \right)\, \mathbf{j}-\frac{{{\kappa }_{\alpha }}}{\kappa }\sin \alpha \, \mathbf{k}$ (4)
联立(3)式和(4)式, 便可得到工具面角方程为:
$\tan \omega =\frac{{{\kappa }_{\phi }}}{{{\kappa }_{\alpha }}}\sin \alpha $ (5)
通过上述研究, 可以得到2条结论:①在推演工具面角方程过程中, 没有限定具体的井眼轨迹模型, 因此(5)式具有普遍适用性; ②工具面既可基于造斜工具来表征, 也可基于井眼轨迹来表征, 前者主要基于钻井工艺需求及设计来确定造斜工具的工作姿态, 而后者主要基于预期的井眼轨迹来确定工具面角。
尽管上述工具面角方程普遍适用于各种井眼轨迹模型, 但是不同井眼轨迹模型的井斜角、井斜变化率和方位变化率等挠曲参数的计算方法及结果不同。因此, 在每个测段[Li-1, Li]上, 需要依据测斜数据先计算出各种井眼轨迹模型的挠曲参数, 才能用(5)式算得不同井眼轨迹模型的工具面角, 然后采用(1)式的评价指标识别井眼轨迹模式。下面给出常用井眼轨迹模型的相关计算公式, 但不具体处理分母为零等特殊情况。
假设井眼轨迹为空间斜平面内的圆弧线[9, 10, 11], 其特征参数是井眼曲率和初始工具面角, 分别用于表征井眼轨迹的空间形状和姿态。
在任一测段[Li-1, Li]上, 应先确定井眼轨迹模型的特征参数:
$\kappa =\frac{{{\varepsilon }_{i-1, i}}}{{{L}_{i}}-{{L}_{i-1}}}$ (6)
$\tan {{\omega }_{i-1}}=\frac{\sin {{\alpha }_{i-1}}\sin {{\alpha }_{i}}\sin \left( {{\phi }_{i}}-{{\phi }_{i-1}} \right)}{\cos {{\alpha }_{i-1}}\cos {{\varepsilon }_{i-1, i}}-\cos {{\alpha }_{i}}}$ (7)
其中 $\cos {{\varepsilon }_{i-1, i}}=\cos {{\alpha }_{i-1}}\cos {{\alpha }_{i}}+\sin {{\alpha }_{i-1}}\sin {{\alpha }_{i}}\cos \left( {{\phi }_{i}}-{{\phi }_{i-1}} \right)$
进而, 便可求得任一井深L处的井斜角、井斜变化率和方位变化率:
$\cos \alpha =\cos {{\alpha }_{i-1}}\cos \varepsilon -\sin {{\alpha }_{i-1}}\cos {{\omega }_{i-1}}\sin \varepsilon $ (8)
${{\kappa }_{\alpha }}=\frac{\kappa }{\sin \alpha }\left( \cos {{\alpha }_{i-1}}\sin \varepsilon +\sin {{\alpha }_{i-1}}\cos {{\omega }_{i-1}}\cos \varepsilon \right)$ (9)
${{\kappa }_{\phi }}=\kappa \frac{\sin {{\alpha }_{i-1}}\sin {{\omega }_{i-1}}}{{{\sin }^{\text{2}}}\alpha }$ (10)
其中 $\varepsilon =\kappa \left( L-{{L}_{i-1}} \right)$
假设井眼轨迹为等变螺旋角的圆柱螺线, 其特征参数是井眼轨迹在垂直剖面图和水平投影图上的曲率, 在垂直剖面图和水平投影图上井眼轨迹均为圆弧[12, 13, 14]。
首先, 计算特征参数:
${{\kappa }_{\text{v}}}=\frac{{{\alpha }_{i}}-{{\alpha }_{i-1}}}{{{L}_{i}}-{{L}_{i-1}}}$ (11)
${{\kappa }_{\text{h}}}=\frac{\text{ }\!\!\pi\!\!\text{ }}{180}\frac{{{\phi }_{i}}-{{\phi }_{i-1}}}{\cos {{\alpha }_{i-1}}-\cos {{\alpha }_{i}}}{{\kappa }_{\text{v}}}$ (12)
进而得出:
$\alpha ={{\alpha }_{i-1}}+{{\kappa }_{\text{v}}}\left( L-{{L}_{i-1}} \right)$ (13)
${{\kappa }_{\alpha }}={{\kappa }_{\text{v}}}$ (14)
${{\kappa }_{\phi }}={{\kappa }_{\text{h}}}\sin \alpha $ (15)
假设井眼轨迹是以井深为自变量的空间自然曲线, 其特征参数是井斜变化率和方位变化率, 井斜角和方位角随井深均呈线性变化[15]。
首先, 计算特征参数:
${{\kappa }_{\alpha }}=\frac{{{\alpha }_{i}}-{{\alpha }_{i-1}}}{{{L}_{i}}-{{L}_{i-1}}}$ (16)
${{\kappa }_{\phi }}=\frac{{{\phi }_{i}}-{{\phi }_{i-1}}}{{{L}_{i}}-{{L}_{i-1}}}$ (17)
进而得出:
$\alpha ={{\alpha }_{i-1}}+{{\kappa }_{\alpha }}\left( L-{{L}_{i-1}} \right)$ (18)
假设井眼轨迹为井眼曲率和工具面角均保持不变的空间曲线[16, 17], 其特征参数为井眼曲率和工具面角, 在垂直剖面图上井眼轨迹为圆弧。
首先, 计算特征参数:
$\kappa =\frac{{{\alpha }_{i}}-{{\alpha }_{i-1}}}{\left( {{L}_{i}}-{{L}_{i-1}} \right)\cos \omega }$ (19)
$\tan \omega =\frac{\text{ }\!\!\pi\!\!\text{ }}{180}\frac{{{\phi }_{i}}-{{\phi }_{i-1}}}{\ln \left( \tan \frac{{{\alpha }_{i}}}{2} \right)-\ln \left( \tan \frac{{{\alpha }_{i-1}}}{2} \right)}$ (20)
进而得出:
$\alpha ={{\alpha }_{i-1}}+\kappa \left( L-{{L}_{i-1}} \right)\cos \omega $ (21)
${{\kappa }_{\alpha }}=\kappa \cos \omega $ (22)
${{\kappa }_{\phi }}=\kappa \frac{\sin \omega }{\sin \alpha }$ (23)
某水平井的部分随钻测斜数据如表1所示。根据上述井眼轨迹模式的识别方法, 首先按不同井眼轨迹模型算得每个测段的特征参数, 然后再求取各测点处工具面角的理论值及绝对误差。如果各测段均选用下测点的工具面角, 则各种井眼轨迹模型的计算结果如表1所示。结果表明:在该算例中, 自然曲线模型的平均绝对误差最小, 所以自然曲线模型最符合实际情况。
| 表1 井眼轨迹的测斜数据及模式识别结果 |
采用工具面角理论值与实测值之间的平均绝对误差作为评价指标, 利用工具面角来识别井眼轨迹模式, 可从现有模型中筛选出最符合实际的井眼轨迹模型。
为了计算各种井眼轨迹模型的工具面角理论值, 本文建立了形式简洁、普遍适用的工具面角方程。通过提取各种井眼轨迹模型的特征参数, 建立相关挠曲参数的计算公式, 便可算得工具面角理论值。
井眼轨迹模式识别提供了测斜计算方法的定量评价指标和选用依据, 可避免主观和随意选用测斜计算方法等问题, 从而提高井眼轨迹的监测精度及可靠性。
符号注释:
E— — 东坐标, m; ex— — x轴的单位坐标向量; ey— — y轴的单位坐标向量; ez— — z轴的单位坐标向量; e— — 工具面角理论值与实测值的平均绝对误差, (° ); H— — 垂深, m; h— — 井眼高边方向的单位向量; i— — N轴的单位坐标向量; i— — 测点序号; j— — E轴的单位坐标向量; k— — H轴的单位坐标向量; L— — 井深, m; m— — 造斜工具定向方向的单位向量; N— — 北坐标, m; n— — 井眼轨迹主法线方向的单位向量; n— — 测段数; t— — 井眼前进方向的单位向量; x— — 井眼高边坐标, m; y— — 井眼右向坐标, m; z— — 井眼切向坐标, m; α — — 井斜角, (° ); ε — — 弯曲角, (° ); κ — — 井眼曲率, (° )/m; κ h— — 井眼轨迹在水平投影图上的曲率, (° )/m; κ v— — 井眼轨迹在垂直剖面图上的曲率, (° )/m; κ α — — 井斜变化率, (° )/m; κ ϕ — — 方位变化率, (° )/m; Ω — — 工具面角实测值, (° ); ω — — 工具面角理论值, (° ); ϕ — — 方位角, (° )。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|