

0 引言
随着尾管钻井与导向钻井技术的发展,定向套管钻井和尾管导向钻井技术已应用于定向井和水平井钻井作业[3,7],增强了复杂地层的井壁稳定性,防止地层漏失,减少储层伤害,缩短钻井周期[8⇓⇓-11],降低卡钻风险[12⇓-14]。其中,旋转导向尾管钻井系统在水平井中的应用降低了复杂地层大位移钻井风险,增加了钻井延伸极限[2,5,15]。该系统集成了尾管钻井、旋转导向、专用井下马达、套管钻井专用钻头等多项技术[16-17],可有效减少井筒工程作业风险并缩短钻井周期[1,4⇓ -6],但只有少数国际油服公司掌握其核心技术。目前,套管钻井通过套管为底部钻具组合和钻头传递扭矩与钻压,尾管钻井技术通过上部钻杆与下部尾管共同为底部钻具组合及钻头传递扭矩和钻压。旋转导向尾管钻井系统上部大钻杆驱动下部尾管及其内部小钻杆同步低速旋转,向钻头传递钻压;依靠专用井下马达为底部导向钻具组合与钻头提供旋转扭矩,提高了导向能力、机械钻速与钻井深度,但钻机旋转动力设备负载显著增加,使用和维护旋转导向装置、专用井下马达等特殊装备的成本高。
基于前人对水平井尾管导向钻井技术的研究,笔者介绍了水平井双管柱尾管差速旋转钻进新方法及配套工具,采用双旋转系统驱动全井筒双管柱差速旋转降低单套旋转动力系统载荷;提出了双管柱差速旋转导向钻具组合工具面控制方法,配备常规螺杆钻具和随钻测量工具实现导向钻井;建立了水平井双管柱尾管差速旋转钻进极限预测模型,对比分析了双管柱差速旋转钻进方式较常规尾管钻进的水平井段延伸效果,为水平井尾管完井与钻井一体化设计控制提供有益参考。
1 水平井双管柱尾管差速旋转钻进
笔者提出了水平井双管柱尾管差速旋转钻进新方法,利用转盘和顶驱两套旋转动力系统分别控制外层管柱与内层管柱的转速,实现全井双管柱差速钻进。外层尾管低速旋转降低管柱轴向摩阻,内层钻杆高速旋转驱动钻头破岩,配备常规随钻测量仪器与螺杆钻具即可实现双管柱差速旋转导向钻进,从而摆脱了对旋转导向系统、专用井下马达等特殊装备的依赖性,实现了水平井尾管完井与钻井一体化作业。
1.1 双管柱尾管差速旋转钻进技术原理
针对深部地层水平井,采用图1a 所示的双管柱尾管差速旋转钻具组合,下部钻具是由外层尾管柱与内层小钻杆柱组成的双管柱,上部钻具是由技术套管与内层大钻杆组成的双管柱。下部钻杆与上部大钻杆通过悬挂器内滑套短节螺纹连接,下部尾管与上部大钻杆通过悬挂器、差速旋转传动装置中心轴螺纹连接,由上部大钻杆承受下部双管柱的轴向载荷;技术套管与尾管通过差速旋转传动装置键槽式连接,仅传动扭矩。钻机通过顶驱和转盘两套旋转动力系统分别为大钻杆和技术套管提供旋转动力,从而有效控制大钻杆高速旋转、技术套管低速旋转。技术套管旋转可降低弯曲井段的管柱轴向摩阻,并驱动二级扩眼钻头旋转破岩;大钻杆和小钻杆高速旋转驱动领眼钻头和一级扩眼钻头旋转破岩,尾管低速旋转降低水平钻井管柱轴向摩阻。扩眼钻头驱动装置安置于一级扩眼钻头与小钻杆之间,减少尾管承受的反扭矩与振动;领眼钻头连接常规地质导向钻具组合,在导向钻具组合与小钻杆之间安置复合旋转导向装置,用于调节和控制螺杆钻具工具面,实现水平井双管柱尾管差速旋转导向钻进。钻至设计井深后,向钻杆内投入金属球并泵送至滑套短节的球座,通过液压剪切销钉后滑套下行,完成悬挂器的坐挂、小钻杆与尾管分离等作业程序,起出大钻杆及小钻杆。通过常规钻杆输送固井工具至尾管位置后进行固井作业,完成后起出作业管柱。若尾管为筛管,则省略尾管固井作业流程。针对中浅部复杂地层,可将水平井双管柱尾管钻具组合简化为图1b 所示结构。
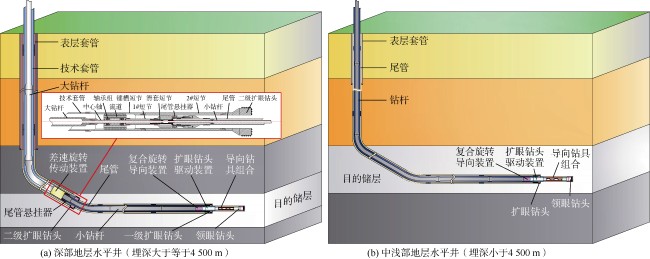
相比现有套管与尾管钻井系统,水平井双管柱尾管差速旋转钻井系统的主要特点包括:①钻机通过两套旋转系统驱动双层管柱差速旋转钻进,可一次作业完成技术套管钻井与尾管钻完井,将两趟钻作业合并为一趟钻作业;②双管柱尾管差速旋转钻井系统提高了钻机旋转系统对导向钻具组合的动力传动效率,防止单套旋转动力系统负载过大;③相比旋转地质导向系统,通过复合旋转导向装置调控螺杆钻具工具面,配备常规地质导向工具即可完成地层信息采集与导向钻进;④优化设计双层管柱结构,由大钻杆承受尾管与小钻杆轴向载荷,内外层管柱差速旋转模式可降低井下管柱摩擦扭矩,增加水平井机械延伸极限。
1.2 关键工艺流程
以深部地层水平井双管柱尾管钻井为例,其关键工艺流程如下:①完成双管柱连接并暂时固定于转盘面(见图2a )。若尾管设计长度超过当前井深,则先使用与二级扩眼钻头同尺寸的钻头钻至尾管设计长度同等井深,然后起出钻柱,再进行双层管柱装配与下入。②钻机通过顶驱和转盘两套旋转动力设备分别为大钻杆和技术套管提供扭矩,通过调节大钻杆和技术套管转速控制小钻杆高速旋转与尾管低速旋转。小钻杆驱动领眼钻头,在地层钻出小尺寸井眼(见图2b )。③尾管低速旋转减少轴向摩阻,小钻杆前端扩眼钻头驱动装置驱动尾管前端一级扩眼钻头高速旋转并破碎岩石。通过复合旋转导向装置调控钻头钻进方向,实现双层管柱差速旋转导向钻进(见图2c )。④转盘系统驱动技术套管与二级扩眼钻头旋转,破碎岩石钻进,通过技术套管与大钻杆之间环空为二级扩眼钻头提供钻井液,扩眼后的井眼可使得技术套管通过(见图2d )。⑤技术套管钻井与尾管钻井同步完成后,通过滑套短节完成尾管悬挂器的悬挂和内外管柱分离,起出内层钻杆与配套装置。技术套管末端暂时固定于转盘面,尾管悬挂于技术套管内壁(见图2e )。⑥通过作业管柱将固井短节下至尾管悬挂器位置,固井短节前端进入尾管悬挂器,固井短节到达技术套管键槽短节位置后在轴向压力作用下完成环空密封,然后进行技术套管与完井尾管的固井作业(见图2f )。⑦用水泥浆对套管和尾管外环空进行封固后起出固井作业管柱,进行憋压候凝(见图2g )。⑧固井水泥凝固后,下入螺杆钻具与PDC(聚晶金刚石复合片)钻头,钻磨完井管柱内水泥塞,循环清洗井筒后起出钻柱(见图2h )。
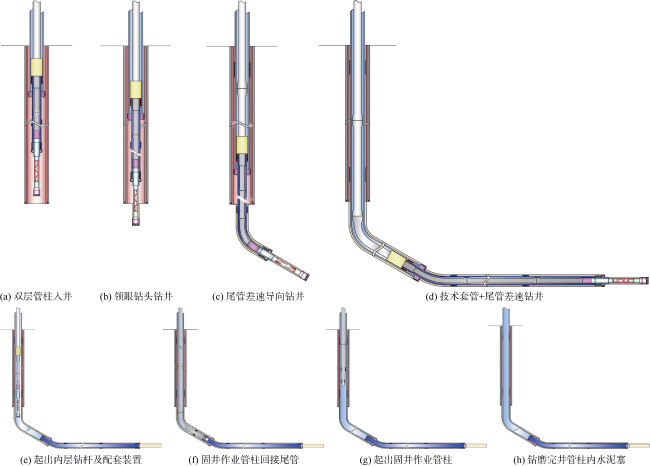
钻进过程中若更换领眼钻头或一级扩眼钻头,需要将尾管与小钻杆起出,技术套管保持在井眼内,可减少起下钻过程中激动压力与抽吸作用对复杂地层井眼稳定性的不良影响;若更换二级扩眼钻头,则需要将大钻杆、差速旋转传动装置及技术套管起出井口,尾管与小钻杆暂时固定于井口,更换二级扩眼钻头后重复步骤①连接双层管柱并下钻至井底。另外,中浅部地层水平井仅采用尾管双管柱,无需配备技术套管双管柱,尾管柱延伸至地面,可直接采用尾管固井,无需下入固井作业管柱;若目的层段采用筛管完井,则采用半程固井工艺对上部非储层段井壁与尾管间环空进行水泥封固即可。
2 水平井双管柱差速旋转导向钻具组合与工具面控制方法
水平井双管柱尾管差速旋转钻井系统在导向钻进时底部导向钻具组合滑动钻进,尾管和其内部小钻杆保持差速旋转钻进。基于复合旋转导向装置和螺杆钻具工作原理,复合旋转导向装置内置摩擦副之间发生旋转摩擦非线性振动,螺杆钻具转子-钻头系统发生扭转振动,复合旋转导向装置-螺杆钻具系统在两者产生的摩擦力矩和反扭矩共同激励下发生强迫扭转振动。通过调节钻柱转速可以控制双管柱差速旋转导向钻具组合的工具面,有效实现水平井双管柱尾管差速旋转导向钻进。
2.1 复合旋转导向装置结构与工作原理
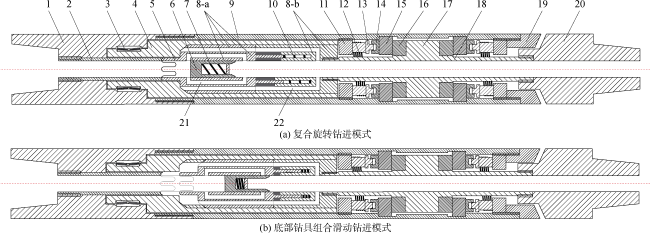
复合旋转导向装置是控制内层钻柱复合钻进和导向钻进的关键装置,上接头与内层钻杆连接,下接头与扩眼钻头驱动装置连接。复合旋转钻进模式下无需控制螺杆钻具工具面(见图3a ),在正常钻进过程中的钻井泵压下,2#通道处于封闭状态,内层钻杆内钻井液流经中心管、1#通道、中心轴和下接头至扩眼钻头驱动装置,此时花键处于耦合状态,该工具整体可视为刚性传动装置,将内层钻杆扭矩及钻压传递至扩眼钻头驱动装置、导向钻具组合和钻头,实现钻杆与螺杆钻具复合旋转钻进。底部导向钻具组合滑动钻进模式下需要控制螺杆钻具工具面(见图3b ),增加泵压至一级压力,液压载荷推动一级滑套下行以封闭1#通道,继续增加泵压至二级压力,液压载荷驱动二级滑套下行并打开2#通道。内层钻杆内钻井液流经中心管、2#通道、中心轴和下接头至扩眼钻头驱动装置,此时花键处于解耦状态,内层钻杆驱动上接头、中心管、外壳、定位块、推力弹簧、推力杆、外摩擦件和止推装置旋转,通过摩擦副旋转摩擦力矩平衡导向钻具组合反扭矩,控制螺杆钻具工具面,实现底部钻具组合滑动钻进。
复合旋转导向装置的主要特点包括:①该装置配备常规随钻测量仪器与螺杆钻具,可实现水平井双管柱尾管差速旋转导向钻进,从而降低了工程作业成本;②该装置内置的两套摩擦副旋转摩擦产生的扭矩用于平衡导向钻具组合反扭矩,减短了导向钻具组合的长度,适用于双管柱尾管差速旋转导向钻进;③该装置仅在双管柱差速旋转导向钻进时工作,增加了稳定运转寿命,为“一趟钻”钻完井提供保障。
2.2 导向钻具组合工具面控制技术
复合旋转导向装置-螺杆钻具系统在钻头反扭矩和复合旋转导向装置旋转摩擦力矩共同激励下发生被迫振动。系统前端螺杆钻具在钻头反扭矩及黏滑振动作用下发生振动,并传递至复合旋转导向装置内置摩擦副的内摩擦件;系统后端的复合旋转导向装置内置摩擦副外摩擦件在上部钻柱扭矩及黏滑振动作用下发生振动,因此内外摩擦件之间存在法向压力和相对旋转,内置摩擦副产生摩擦力矩。将上部钻柱转速和钻头钻压作为复合旋转导向装置-螺杆钻具系统两端激励的控制参数,以控制螺杆钻具工具面。
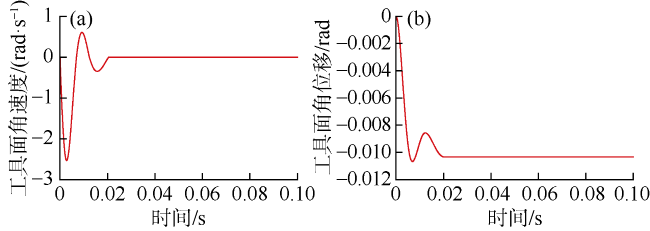
鄂尔多斯盆地东缘深部8号煤层埋藏深度超过2 000 m,水平井底部钻具组合采用螺杆钻具与PDC钻头,根据地层可钻性及钻头类型,结合钻井现场实践,选取钻头钻压为50 kN,螺杆钻具转子转速为120 r/min,钻头渐近动态稳定扭矩值为1 905 kN·m;连接复合旋转导向装置的上部钻柱黏滑振动频率为0.1 Hz,旋转速度峰值为68 r/min;复合旋转导向装置摩擦副之间法向压力为60 kN;时间步长为10 μs。定义顶驱和转盘驱动钻具顺时针旋转方向为正,逆时针旋转方向为负。如图4a 所示,螺杆钻具工具面角速度在0.1 s内呈现衰减振动,在0~0.020 5 s内由2.527 7 rad/s衰减至零点邻域内稳定振动;如图4b 所示,螺杆钻具工具面从0 rad反转做衰减振动,0.020 2 s后螺杆钻具工具面角位移在−0.010 34 rad邻域内动态稳定,振幅为1×10−5 rad,井眼轨迹控制精准且时间充足,可满足导向钻井要求。
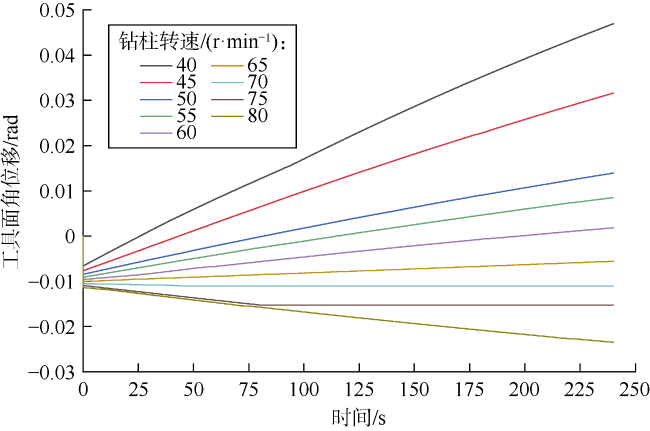
螺杆钻具工具面角位移(下文简称工具面角位移)随上部钻杆转速的变化趋势如图5 所示。上部钻柱转速为70~75 r/min时,螺杆钻具在瞬时振动后小角度反转,工具面角位移在−0.013~−0.010 rad内渐近稳定,即螺杆钻具工具面变化最小,对应最佳钻柱转速区间;上部钻柱转速达到80 r/min后,螺杆钻具瞬时振动后反转,工具面角位移持续反向增加;上部钻柱转速为65 r/min时,螺杆钻具小角度正转,工具面角位移持续正向缓慢增加;上部钻柱转速为40~55 r/min时,随着钻柱转速减小,工具面角位移正向增长速率持续增大。结果表明,在确定复合旋转导向装置内置旋转摩擦副正压力和钻头钻压的条件下,存在最佳钻柱转速区间,有利于双管柱差速旋转导向钻具组合的工具面控制。
3 水平井双管柱尾管差速旋转钻进极限
大型丛式水平井及其工厂化作业逐渐成为非常规油气及海上油气的高效开发模式,其中水平井及大位移井极限延伸技术是实现开发工程降本增效的关键环节之一。Allen等[23]基于实际钻井工程案例,提出了钻井极限延伸工艺;Mason等[24]通过统计资料与分析研究了大位移井延伸极限;Bakke等[25]采用数据统计法对钻井延伸极限开展了相关研究,分析了不同垂深条件下水平位移延伸极限分布规律;Vestavik等[26]介绍了双壁钻杆钻井技术,增加了复杂地层的钻井延伸极限;汪志明等[27]计算了大位移井的水力延伸极限。笔者团队在以往研究中系统提出了包含裸眼延伸极限、机械延伸极限和水力延伸极限的旋转钻井延伸极限概念[28];考虑附加井底压力、安全钻井液密度窗口、循环流速等因素,建立了大位移井裸眼延伸极限模型[29⇓⇓-32];考虑钻机设备、井眼轨迹、管柱结构、钻柱接箍等因素,建立多工况下钻井机械延伸极限计算模型[33⇓⇓-36];通过逐步完善大位移井裸眼、机械和水力的延伸极限计算模型[37⇓⇓⇓⇓⇓⇓⇓-45],构建了大位移井管柱作业延伸极限的工程设计方法与理论体系[46⇓⇓⇓-50]。
水平井尾管差速旋转钻进技术采用转盘和顶驱两套旋转动力系统驱动全井双管柱差速旋转钻进,在钻井系统、井眼条件及管柱强度等约束下存在安全钻进极限深度(即钻进延伸极限)。基于井下管柱整体受力模型和水力学模型,以井眼延伸极限为目标函数,以钻井系统、井下管柱屈曲、管柱失效、水力损耗、井眼清洁及地层破裂等因素为约束条件,综合考虑水平井裸眼、水力和机械延伸极限,建立了水平井双管柱尾管差速旋转钻进延伸极限计算模型。
3.1 水平井双管柱尾管差速旋转钻进延伸极限
3.1.1 钻进延伸极限预测模型
基于井下管柱整体受力模型和水力学模型,考虑钻井系统载荷、井下管柱屈曲、管柱失效、水力损耗及井眼清洁等因素,建立了水平井双管柱尾管差速旋转钻进延伸极限量化预测模型,可允许延伸极限(Lmax)取水力(Lh)、裸眼(Lo)和机械(Lm)3种延伸极限的最小值:
$\left\{ \begin{align} & {{F}_{\text{obj}}}=\underset{p\subset Y}{\mathop{max}}\,L\left( P,h,d,c \right) \\ & {{L}_{\text{max}}}=min\left\{ {{L}_{\text{h}}},{{L}_{\text{o}}},{{L}_{\text{m}}} \right\} \\ \end{align} \right.$
3.1.2 水力延伸极限
针对目的储层地质特征与储层物性,完井尾管主要分为套管和筛管,前者采用常规水力学方程求解管内与管外环空的水力参数与循环损耗;后者本体分布筛孔,钻井液在钻杆、筛管与井壁之间的双环空流动,且两个环空之间存在流体扩散流动,因此,本文建立了双环空模型以计算水力参数与循环损耗。
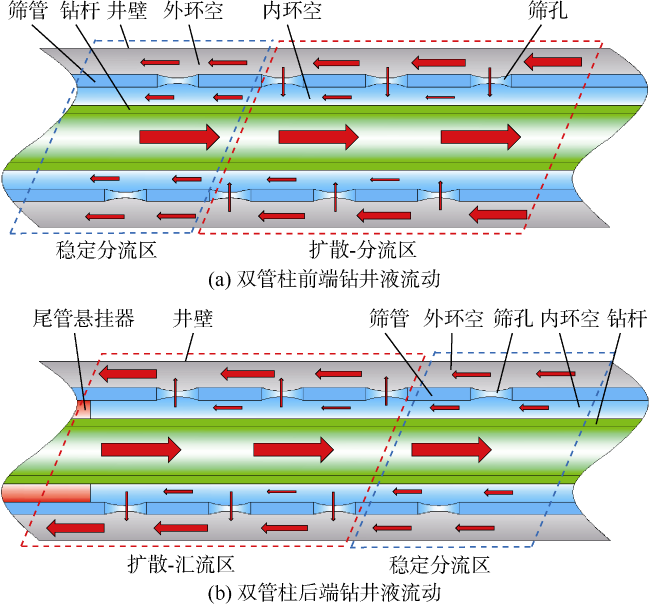
①双环空钻井液流动模型[51]:井壁与筛管之间的环空定义为外环空,钻杆与筛管之间的环空定义为内环空,外环空和内环空的压差定义为环空压差(∆p)。如图6a 所示,钻井液从钻头喷射到井底后进入外环空,在环空压差作用下通过筛孔向内环空扩散。在扩散过程中,外环空钻井液流速(Qa1)减小,内环空钻井液流速(Qa2)增加,环空压差减小。当内外环空压力趋于平衡时,钻井液停止扩散,图6a 红色虚线框区域定义为扩散-分流区;内外环空压力平衡后,两个环空内钻井液以稳定速度流动,图6a 蓝色虚线框区域定义为稳定分流区。当钻井液流至尾管悬挂器时,钻井液从内环空流向外环空,与扩散-分流过程相逆,定义为扩散-汇流区(见图6b 红色虚线框)。忽略钻井液通过筛孔的能量损失,根据能量守恒定律建立双环空总流量(Qa)伯努利方程:
$\left\{ \begin{array}{*{35}{l}} \left( \frac{{{p}_{\text{la}}}}{{{\rho }_{\text{f}}}g}+\frac{{{k}_{f}}v_{\text{a}}^{2}}{2g} \right){{Q}_{\text{a}}}=\left( \frac{{{p}_{\text{la1}}}}{{{\rho }_{\text{f}}}g}+\frac{{{k}_{f}}v_{\text{a1}}^{2}}{2g} \right){{Q}_{\text{a1}}}+\left( \frac{{{p}_{\text{la2}}}}{{{\rho }_{\text{f}}}g}+\frac{{{k}_{f}}v_{\text{a2}}^{2}}{2g} \right){{Q}_{\text{a2}}} \\ {{Q}_{\text{a}}}={{Q}_{\text{a1}}}+{{Q}_{\text{a2}}} \\ {{Q}_{\text{a}}}={{Q}_{c}} \\ \Delta p(i)={{p}_{\text{la1}}}(i)-{{p}_{\text{la2}}}(i) \\\end{array} \right.$
②双管柱水力延伸极限:目的层采用套管完井,外管柱均为套管,井下双管柱循环水力损耗最大值(pmax)为:
${{p}_{\max }}={{p}_{\text{p}}}+{{p}_{\text{ca}}}=\sum\limits_{i=1}^{N}{\left( {{L}_{i}}\frac{d{{p}_{\text{p}}}}{d{{L}_{i}}} \right)}+\sum\limits_{i=1}^{N}{\left( {{L}_{i}}\frac{d{{p}_{\text{ca}}}}{d{{L}_{i}}} \right)}$
目的层采用筛管完井,非目的层为套管柱,筛管与尾管丝扣连接及筛管悬挂于套管内壁两种管柱结构对应的井下双管柱循环水力损耗最大值(pmax)分别为:
$\left\{ \begin{align} & {{p}_{\text{max,1}}}=\sum\limits_{i=1}^{N}{\left( {{L}_{i}}\frac{d{{p}_{\text{p}}}}{d{{L}_{i}}} \right)}+\sum\limits_{i=1}^{k}{\left( {{L}_{i}}\frac{d{{p}_{\text{la1}}}}{d{{L}_{i}}} \right)+\sum\limits_{i=1}^{k}{\left( {{L}_{i}}\frac{d{{p}_{\text{la2}}}}{d{{L}_{i}}} \right)}+} \\ & \ \sum\limits_{i=k+1}^{N}{\left( {{L}_{i}}\frac{d{{p}_{\text{ca2}}}}{d{{L}_{i}}} \right)+\sum\limits_{i=k+1}^{N}{\left( {{L}_{i}}\frac{d{{p}_{\text{ca1}}}}{d{{L}_{i}}} \right)}} \\ & {{p}_{\text{max,2}}}=\sum\limits_{i=1}^{N}{\left( {{L}_{i}}\frac{d{{p}_{\text{p}}}}{d{{L}_{i}}} \right)}+\sum\limits_{i=1}^{k}{\left( {{L}_{i}}\frac{d{{p}_{\text{la1}}}}{d{{L}_{i}}} \right)+} \\ & _{_{_{\ }}}\sum\limits_{i=1}^{k}{\left( {{L}_{i}}\frac{d{{p}_{\text{la2}}}}{d{{L}_{i}}} \right)+\sum\limits_{i=k+1}^{N}{\left( {{L}_{i}}\frac{d{{p}_{\text{ca}}}}{d{{L}_{i}}} \right)}} \end{align} \right.$
水平井双管柱钻进水力延伸极限(Lh)为:
${{L}_{\text{h}}}=\sum\limits_{i=1}^{N}{\left( {{L}_{i}} \right)}$
3.1.3 裸眼延伸极限
$\left\{ \begin{align} & {{p}_{\text{la1 }\!\!\_\!\!\text{ h}}}({{Q}_{c}})={{p}_{\text{f}}}-{{p}_{\text{la1 }\!\!\_\!\!\text{ v}}}-{{p}_{\text{la1 }\!\!\_\!\!\text{ b}}}-9.81{{D}_{\text{v}}}{{\rho }_{\text{f}}} \\ & {{L}_{\text{o}}}=\frac{\max \left[ {{p}_{\text{la1 }\!\!\_\!\!\text{ h}}}({{Q}_{\text{c}}}) \right]}{\left( \frac{d{{p}_{\text{la1 }\!\!\_\!\!\text{ h}}}}{d{{L}_{\text{h}}}} \right)} \\ \end{align} \right.$
3.1.4 机械延伸极限
忽略管柱振动,假设尾管差速旋转钻井系统的双管柱作为整体在井眼内稳定旋转运动,且钻杆转速大于尾管转速。采用井下管柱整体受力模型[52],计算内外层管柱微元在差速旋转运动状态下的扭矩和轴向力:
$\left\{ \begin{array}{*{35}{l}} \frac{dM_{\text{T}1,{{k}_{p}}}^{{}}}{dL}=-{{\mu }_{1}}n_{\text{t}1,{{k}_{p}}}^{{}}\frac{D_{1,{{k}_{p}}}^{{}}}{2} \\ \begin{align} & \frac{dM_{\text{T}2,{{k}_{p}}}^{{}}}{dL}={{\mu }_{1}}n_{\text{t}2,{{k}_{p}}}^{{}}\frac{d_{2,{{k}_{p}}}^{{}}}{2}-{{\mu }_{2}}n_{\text{t}2,{{k}_{p}}}^{{}}\frac{D_{2,{{k}_{p}}}^{{}}}{2} \\ & \frac{dF}{dL}=-EI{{\kappa }_{\text{b}}}\frac{d{{\kappa }_{\text{b}}}}{dL}-{{q}_{\text{w}}}\cos \alpha \pm {{F}_{\text{f}}} \\ \end{align} \\\end{array} \right.$
其中,计算轴向力公式中Ff项前“±”号取“+”代表管柱下放工况,取“−”代表管柱上提工况。
基于笔者提出的水平井机械延伸预测模型,综合考虑本文提出的双管柱结构、内外管柱差速旋转钻进方式,建立了水平井双管柱钻进机械延伸极限(Lm)计算模型:
${{L}_{\text{m}}}=\sum\limits_{i=1}^{N}{{{L}_{i}}\left( P,d,c \right)}$
3.2 工程案例
鄂尔多斯盆地东缘深部煤层气井取得产量突破,标志着中国深部煤层气开发进入新阶段[53⇓⇓-56]。以鄂尔多斯盆地东缘深部煤层某水平井为例,采用本文提出的延伸极限计算模型,评估水平井双管柱尾管差速旋转钻进延伸能力。该井目的层埋深1 935~1 940 m,最大井眼曲率为4°/30 m,造斜点井深1 455 m,着陆点井深2 005 m,表层套管下入深度200 m封固上部复杂地层,尾管采用套管与筛管组合管柱设计,非煤系地层下入套管至2 000 m,目的煤层下入筛管完井。煤岩密度平均值为1 410 kg/m3,煤层顶底板岩石密度平均值为2 400 kg/m3;钻井液密度1 300 kg/m3,流性指数为0.540 6,稠度系数为0.386 1 Pa·sn。完井筛管每米分布20个孔,孔径5 mm,设计为规则圆形。采用PDC钻头配合螺杆钻具在非煤系地层钻进过程中形成的岩屑颗粒比较均匀且粒径偏小,粒径范围为0.1~5.0 mm;煤层煤体结构复杂,构造煤形成的岩屑颗粒直径不均匀[57],粒径范围为0.1~10.0 mm。双环空岩屑颗粒运移临界钻井液流速为0.3 m/s。
3.2.1 双管柱钻进裸眼延伸极限
表1 水平井段双管柱尾管钻进裸眼延伸极限 |
| 编号 | 井眼 直径/ mm | 双管柱组合 | 井眼清洁临界 钻井液排量/ (L•s−1) | 水平段裸眼 延伸极限/m | |
|---|---|---|---|---|---|
| 筛管外径/ mm | 钻杆外径/ mm | ||||
| 1# | 193.7 | 139.7 | 88.9 | 10.0 | 33 646 |
| 2# | 193.7 | 139.7 | 101.6 | 22.4 | 20 424 |
| 3# | 215.9 | 177.8 | 88.9 | 34.6 | 26 642 |
| 4# | 215.9 | 177.8 | 101.6 | 26.9 | 27 084 |
| 5# | 215.9 | 177.8 | 114.3 | 19.8 | 27 390 |
3.2.2 双管柱钻进水力延伸极限
循环系统管线额定压力为35 MPa,减去地面循环压耗,井下管柱循环压力安全值设为30 MPa。以双环空岩屑颗粒运移临界钻井液流速为约束条件,计算得到不同双管柱结构对应的井眼清洁临界钻井液排量、水力延伸极限(见表2 )。1#、2#、5#双管柱结构的水平段水力延伸极限分别为10 735,6 245,1 201 m,3#和4#双管柱结构在井眼清洁临界钻井液排量条件下的井下管柱循环压力超过30 MPa,无法满足水平井段双管柱尾管钻进作业条件。在满足后期增产及生产作业要求的前提下,优选1#和2#双管柱结构。
表2 水平井段双管柱尾管钻进水力延伸极限 |
| 编号 | 井眼 直径/ mm | 双管柱组合 | 井眼清洁临界 钻井液排量/ (L·s−1) | 水平段水力 延伸极限/m | |
|---|---|---|---|---|---|
| 筛管外径/ mm | 钻杆外径/ mm | ||||
| 1# | 193.7 | 139.7 | 88.9 | 10.0 | 10 735 |
| 2# | 193.7 | 139.7 | 101.6 | 22.4 | 6 245 |
| 3# | 215.9 | 177.8 | 88.9 | 34.6 | |
| 4# | 215.9 | 177.8 | 101.6 | 26.9 | |
| 5# | 215.9 | 177.8 | 114.3 | 19.8 | 1 201 |
3.2.3 双管柱尾管钻进机械延伸极限
针对1#、2#和5#双管柱组合进行井下管柱整体受力计算,得到水平井双管柱尾管钻进机械延伸极限。双管柱尾管钻井有3种方式:M1代表尾管柱低速旋转+钻杆柱滑动钻进;M2代表尾管与钻杆柱同步低速旋转钻进;M3代表本文提出的双管柱尾管差速旋转钻进。如表3 所示,1#双管柱在3种钻进方式下的水平段机械延伸极限分别为1 810,2 595,3 852 m,采用双管柱尾管差速旋转钻进比前两种钻进方式水平进尺分别增加了112.82%,48.44%;2#双管柱在3种钻进方式下的水平段机械延伸极限分别为1 533,2 411,3 993 m,采用双管柱尾管差速旋转钻进比前两种钻进方式水平进尺分别增加了160.47%,65.62%;5#双管柱在3种钻进方式下的水平段机械延伸极限分别为552,1 101,2 107 m,采用双管柱尾管差速旋转钻进比前两种钻进方式水平进尺分别增加了281.70%,91.37%。由此可见,相比M1和M2钻进方式,采用本文提出的水平井双管柱尾管差速旋转钻进方式(M3)可有效增加水平井钻进机械延伸极限。
表3 水平井段双管柱尾管钻进机械延伸极限 |
| 编号 | 井眼 | 双管柱组合 | 水平段机械延伸极限/m | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 直径/mm | 筛管外径/mm | 钻杆外径/mm | M1 | M2 | M3 | ||||||||
| 1# | 193.7 | 139.7 | 88.9 | 1 810 | 2 595 | 3 852 | |||||||
| 2# | 193.7 | 139.7 | 101.6 | 1 533 | 2 411 | 3 993 | |||||||
| 5# | 215.9 | 177.8 | 114.3 | 552 | 1 101 | 2 107 | |||||||
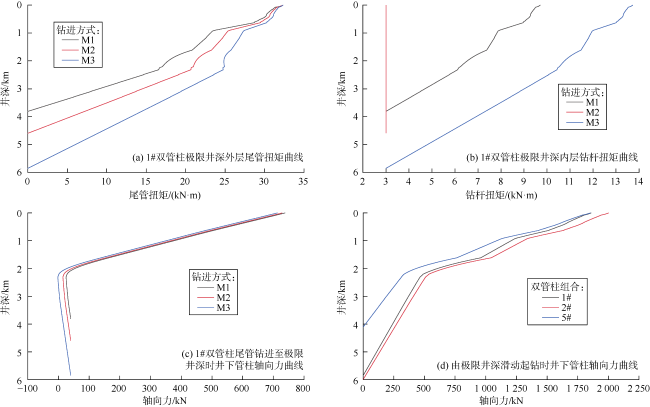
1#、2#和5#双管柱尾管钻进时,尾管与岩屑床和井壁之间的摩擦扭矩传递至钻机转盘,钻杆与尾管之间摩擦扭矩与钻头破岩扭矩传递至顶驱系统。以1#双管柱组合为例,对比图7a 和图7b 发现,M1、M2和M3钻进方式条件下转盘扭矩明显大于顶驱扭矩,说明转盘额定扭矩是限制双管柱尾管旋转钻进延伸极限的决定因素;以转盘额定扭矩32.36 kN·m为约束条件,3种钻进方式对应极限井深分别为3 810,4 595,5 852 m。钢级为P110的套管最大剪切屈服应力为438.2 MPa,本体弹性极限扭矩为86.5 kN·m,螺纹上扣扭矩极限值取92.28 kN·m[60-61],3种钻进方式极限井深对应尾管承受的最大扭矩(32.36 kN·m)小于上述二者间最小值,满足安全钻进要求。M1、M2和M3钻进方式下1#双管柱尾管钻进至极限井深时井下管柱轴向力曲线如图7c 所示,3种钻进方式井下管柱对应最大轴向力分别为780.87,729.03,713.47 kN,均未超过钻机顶驱额定提升载荷3 150 kN,满足双管柱尾管安全钻进要求;1#、2#和5#双管柱组合由极限井深滑动起钻时井下管柱轴向力曲线如图7d 所示,3种双管柱组合最大轴向力分别为1 861.33,2 003.28,1 854.14 kN,同样均未超过钻机顶驱额定提升载荷,满足双管柱安全起钻作业要求。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3.2.4 双管柱尾管钻进延伸极限
综合考虑双管柱循环压耗与受力情况,水平井双管柱尾管钻进延伸极限取裸眼、水力和机械3种延伸极限的最小值。如表4 所示,Φ193.7 mm井眼内1#和2#双管柱水平段钻进延伸极限受机械延伸极限约束,分别为3 852,3 993 m;Φ215.9 mm井眼内5#双管柱水平段钻进延伸极限受水力延伸极限约束,为1 201 m。双管柱机械延伸极限为控制因素时,钻完井施工重点侧重于减少水平井双管柱摩阻与扭矩;双管柱水力延伸极限为控制因素时,钻完井施工重点侧重于提高水平井双环空携岩效率及降低水力循环压力损耗。
表4 水平井段双管柱尾管差速旋转钻进延伸极限 |
| 编号 | 井眼直径/ mm | 双管柱组合 | Lo/m | Lh/m | Lm/m | Lmax/m | |
|---|---|---|---|---|---|---|---|
| 筛管外径/mm | 钻杆外径/mm | ||||||
| 1# | 193.7 | 139.7 | 88.9 | 33 646 | 10 735 | 3 852 | 3 852 |
| 2# | 193.7 | 139.7 | 101.6 | 20 424 | 6 245 | 3 993 | 3 993 |
| 5# | 215.9 | 177.8 | 114.3 | 27 390 | 1 201 | 2 107 | 1 201 |
4 结论
本文提出的水平井双管柱尾管差速旋转钻进新方法,配备双管柱差速旋转传动、复合旋转导向及悬挂器等井下专用工具,可以通过双旋转系统驱动全井双管柱差速旋转钻进,避免了常规尾管钻进单套旋转动力系统负载过大问题,完成尾管完井与钻井一体化安全高效作业,有效降低工程风险与成本;优化设计了与水平井双管柱尾管差速旋转钻井系统相配套的复合旋转导向装置,提出双管柱导向钻具组合工具面控制方法,配备常规螺杆钻具及随钻测量装置,实现了双管柱尾管差速旋转导向钻进。
基于水平井双管柱尾管差速旋转钻进延伸极限计算模型,鄂尔多斯盆地东缘深部煤层气水平井工程案例中,1#双管柱采用尾管柱低速旋转+钻杆柱滑动钻进和尾管+钻杆柱同步低速旋转钻进的延伸极限分别为1 810,2 595 m,相同条件下采用双管柱尾管差速旋转钻进的延伸极限为3 852 m,显著增加了水平段钻进长度。分别优化设计了适用于Φ193.7 mm和Φ215.9 mm井眼的双管柱组合,前者的控制因素为机械延伸极限,后者的控制因素为水力延伸极限。
符号注释:
c——起钻、钻进等作业工况;d——双管柱结构、井眼轨迹、井下工具等设计参数;d2——外层管柱内径,m;Dv——储层埋深,m;D1——内层管柱直径,m;D2——外层管柱直径,m;E——管柱弹性模量,Pa;F——井下管柱轴向拉力,N;Ff——单位长度井下管柱摩阻,N/m;Fobj——水平井双管柱尾管差速旋转钻井延伸极限的目标函数;g——重力加速度,m/s2;h——钻井液性能、水力循环压力和岩屑运移临界流速等水力约束条件;i——井段微元序号;I——管柱截面惯性矩,m4;k——筛管微元数量;kf——流量系数,无因次;L——井下管柱长度,m;Lh——水平井双管柱尾管钻井水力延伸极限,m;Li——第i井段长度,m;Lm——水平井双管柱尾管钻井机械延伸极限,m;Lmax——水平井双管柱尾管钻进延伸极限,m;Lo——水平井双管柱尾管钻井裸眼延伸极限,m;MT1——内层管柱扭矩,N·m;MT2——外层管柱扭矩,N·m;n——流变指数,无因次;nt1——内层管柱作用于外层管柱的正压力,N;nt2——双层管柱作用于井壁的正压力,N;N——完井管柱微元数量,且$1\le i\le k\le N$;pca——套管完井段井下双管柱与井壁之间环空内水力损耗,Pa;pca1,pca2——套管与井壁及套管与钻杆之间环空内水力损耗,Pa;pf——储层破裂压力,Pa;pla——筛管柱前端一级扩眼钻头与井壁之间环空压力,Pa;pla1,pla2——外、内环空压力,Pa;pla1_b——大井斜井段(井斜角大于30°)双管柱外环空循环压力,Pa;pla1_h——水平井段双管柱外环空循环压力,Pa;pla1_v——小井斜井段(井斜角小于等于30°)双管柱外环空循环压力,Pa;pmax——井下双管柱循环水力损耗最大值,Pa;pmax,1——筛管与尾管丝扣连接对应的井下双管柱循环水力损耗最大值,Pa;pmax,2——筛管悬挂于套管内壁对应的井下双管柱循环水力损耗最大值,Pa;pp——井下管柱内水力损耗,Pa;P——提升系统载荷、旋转系统载荷、管柱失效极限等机械参数;∆p——外、内环空之间的压差,Pa;qw——单位长度井下管柱在钻井液中的重力,N/m;Qa——双环空钻井液总流量,L/s;Qa1——外环空钻井液流量,L/s;Qa2——内环空钻井液流量,L/s;Qc——井眼清洁临界钻井液排量,L/s;va——钻井液流速,m/s;va1,va2——外、内环空内钻井液流速,m/s;Y——约束参数的允许区域,即约束条件;α——井斜角,rad;${{\kappa }_{\text{b}}}$——井眼轴向的曲率,m−1;μ1——内、外层管柱之间摩阻系数,无因次;μ2——外层管柱与井壁之间摩阻系数,无因次;ρf——钻井液密度,kg/m3。下标:kp——取值为1时内、外层管柱分别为小钻杆和尾管,取值为2时内、外层管柱分别为大钻杆和技术套管。