

0 引言
受人为活动和地质活动的影响,封存于地下的CO2存在渗漏和逃逸到浅层含水层、土壤和大气层的风险。大规模CO2封存项目注入规模及强度明显提升,可能诱发井筒破坏、裂缝开启、断层活化等泄漏风险。针对CO2封存项目进行监测,及时预测与发现泄漏等风险,是保障CO2封存项目安全性、有效性和持久性的重要环节[11-12]。CO2封存监测也是埋存量评估与核算的重要方法,为CO2封存项目进入碳交易市场提供有效信息[12]。目前已发展出多种工具和技术用于CO2封存的监测,根据空间范围可以分为大气监测技术、近地表监测技术和地层监测技术[1,3]。目前常用的大部分监测手段尚无法同时兼顾实时、大范围和长周期的监测需求,并且存在监测系统智能化程度低、布点规划性弱等局限性[1]。
国内外多个机构和学者对空间信息技术在CO2封存监测中的应用进行了介绍和综述。Jeyanny等[15]介绍了遥感技术和地理信息系统在CO2封存监测领域的应用。美国国家能源技术实验室在2017年颁布的《CO2地质封存项目的监测、验证和核算的参考规范》中对涡度相关法、合成孔径雷达干涉技术(InSAR)和全球导航卫星系统在CO2封存监测中应用的优缺点与相关实例进行了介绍[11]。Vasco等[16]介绍了合成孔径雷达干涉技术和全球导航卫星系统在CO2封存监测中的应用原理与应用实例。Zhang等[17]介绍了遥感技术在CO2封存监测中的应用。张成龙等[18]介绍了监测大气CO2通量的涡度相关法和合成孔径雷达干涉技术。赵改善[19]介绍了合成孔径雷达干涉技术和全球导航卫星系统在CO2封存监测中的应用。总体来看,上述机构和学者仅介绍了部分技术,尚缺乏对多种空间信息技术在CO2封存监测领域应用的技术原理、适用场景与现场应用的系统分析。因此,本文旨在系统分析多种空间信息技术的原理及其在CO2封存监测中的应用,辨识空间信息技术在CO2封存监测中面临的挑战,展望空间信息技术在CO2封存监测中的发展前景。
1 空间信息技术在CO2封存监测领域的应用现状
空间信息技术在CO2封存监测中的应用主要分为监测数据获取、定位与数据传输、数据管理与决策支持等3个环节,通过涡度相关法、遥感技术、地理信息系统、物联网技术(IoT)和全球导航卫星系统等5类技术实现。图1 展示了空间信息技术应用于碳封存监测时各环节的空间分布及其关系。通过涡度协方差监测、遥感技术等不同手段获取的监测数据需要与空间定位技术相结合,与地理信息系统相整合,进行数据管理与分析。
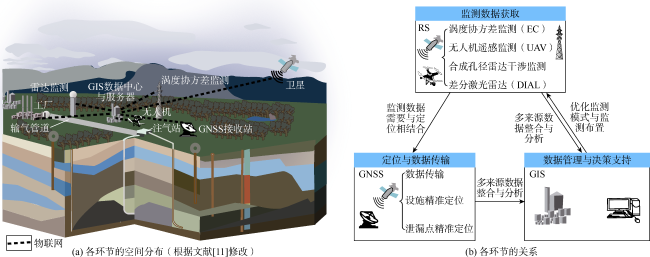
表1 空间信息技术在碳封存监测领域的技术指标、成熟度和应用案例 |
| 技术类别 | 技术名称 | 监测参数/功能 | 技术成熟度 | 应用案例或验证案例 |
|---|---|---|---|---|
| 涡度相关法 | 涡度协方差监测 | CO2通量[11] | 在碳封存项目应用 | ①应用于澳大利亚CO2CRC Otway碳封存项目[20]; ②应用于美国Farnsworth油田CO2提高采收率项目[21] |
| 遥感技术 | 差分吸收激光雷达监测 | CO2数密度[11] | 在碳封存项目应用 | 应用于美国Kevin Dome碳封存项目[11] |
| 傅里叶变换红外监测 | CO2浓度[22] | 进行可行性试验 | 在捷克波西米亚Cheb盆地天然CO2渗出地表的 现场进行技术验证[22] | |
| 可调谐半导体激光监测 | CO2浓度[23] | 在碳封存项目应用 | 应用于美国伊利诺伊盆地Decatur碳封存项目[23] | |
| 拉曼激光雷达监测 | CO2浓度[17] | 进行可行性试验 | 在韩国Eumsong环境影响评价试验设施进行技术验证[17] | |
| 温室气体激光层析成像 | CO2浓度[11] | 在碳封存项目应用 | 应用于美国伊利诺伊盆地Decatur碳封存项目[11] | |
| 无人机遥感监测 | CO2浓度[11] | 进行可行性试验 | ①在哥伦比亚巴兰基亚市测试无人机遥感数据传输[24]; ②俄克拉荷马州立大学组装的无人机集成系统,预计在美国Farnsworth碳封存项目中进行安装、测试和优化[11] | |
| 卫星光谱监测 | CO2浓度[17] | 正在开展研发工作 | ||
| 高光谱影像 | 植被健康状况[11] | 进行可行性试验 | 在美国蒙大拿州ZERT试验场进行试验[11] | |
| 合成孔径雷达干涉测量 | 地表形变[11] | 在碳封存项目应用 | ①应用于阿尔及利亚In Salah CO2强化采气示范项目[11]; ②应用于美国Kelly Snyder油田CO2提高采收率项目[25]; ③应用于中国靖边CO2提高采收率项目[26]; ④应用于加拿大Aquistore碳封存项目[27] | |
| 全球导航卫星系统 | 全球导航卫星系统监测 | 地表形变 [11] | 在碳封存项目应用 | ①应用于加拿大Aquistore碳封存项目[27]; ②应用于美国德州南部某CO2提高采收率项目[28] |
| 全球导航卫星系统定位 | 定位 | 进行可行性试验 | 在印度尼西亚雅加达对CO2传感器与 GNSS接收器的结合进行测试[29] | |
| 物联网技术 | 无线传感器网络 | 数据传输 | 正在开展研发工作 | |
| 地理信息系统 | 地理信息系统 | 数据管理与决策支持 | 在碳封存项目应用 | 在美国伊利诺伊盆地Decatur碳封存项目进行应用[30] |
空间信息技术在中国碳封存监测领域的应用处于起步阶段,根据文献资料调研,目前只有合成孔径雷达干涉技术在中国靖边CO2提高采收率项目中得到了应用[26]。
1.1 监测数据获取
目前,已应用于CO2地质封存监测数据获取的空间信息技术包括近地面涡度协方差监测、差分吸收激光雷达监测、无人机监测、合成孔径雷达干涉测量、全球导航卫星系统等[11]。表2 总结了各监测方法的软硬件需求与监测时空范围,其中多个技术可以兼顾实时、大范围、长周期的监测需求。下文针对其中成熟度较高的6个技术的原理和应用情况进行具体分析。
表2 用于碳封存监测数据获取的空间信息技术的软硬件需求与监测时空范围 |
| 技术名称 | 主要软硬件需求 | 监测时空范围 |
|---|---|---|
| 涡度协方差监测 | 硬件:三维声波风速计、气体分析仪[31]; 软件:信号处理软件(电信号向物理参数转换、去除原始数据的 峰值、原始数据矫正等)、评估泄漏位置的反演算法[31,34] | 空间:数平方米至数平方千米范围[11,31]; 时间:通常每秒记录10~20次,通过对瞬时 数据积分计算得到特定时间段的碳通量[11,31] |
| 差分吸收激光雷达监测 | 硬件:脉冲激光发射器、差分吸收激光雷达监测接收器[11]; 软件:差分吸收数据反演CO2浓度的算法[35] | 空间:数平方米至数平方千米[11]; 时间:数据采样间隔为数分钟[36] |
| 傅里叶变换红外监测 | 硬件:干涉仪、红外探测器[22]; 软件:样本的光谱算法[22] | 空间:数平方米至数平方千米范围[22]; 时间:一个完整的采集序列需要10 min[22] |
| 可调谐半导体激光监测 | 硬件:可调谐红外激光器、探测器[23]; 软件:反演CO2浓度的算法[23] | 空间:美国伊利诺伊盆地Decatur碳封存项目 现场安装的系统探测距离为100 m[23]; 时间:高时间分辨率,适合连续监测[37] |
| 拉曼激光雷达监测 | 硬件:激光器、探测器等[36]; 软件:计算CO2浓度的算法[38] | 空间:可行性试验探测距离为2 km[38]; 时间:数据采样间隔为数分钟[39] |
| 温室气体激光层析成像 | 硬件:激光收发器、反光镜、气象站[11]; 软件:基于云的软件工具(用于数据处理、存储、传播, 以及近乎实时地生成CO2浓度的二维地图)[11] | 空间:现场验证可探测0.2 km2的区域[11]; 时间:可提供实时的CO2浓度反馈[11] |
| 无人机遥感监测 | 硬件:CO2传感器、无人机平台[11]; 软件:监测数据在地图上的可视化 | 空间:可行性测试结果显示无人机在0~120 m的 高度范围都可以实现数据传输[24]; 时间:可根据需求设定巡检时间间隔 |
| 卫星光谱监测 | 硬件:卫星、光谱仪[17]; 软件:计算CO2浓度的算法[17] | 空间:数百平方米至数平方千米[40]; 时间:被动遥感受重返周期影响[40] |
| 高光谱影像 | 硬件:光谱成像传感器[11]; 软件:图像降噪、反演与可视化 | 空间:数平方米至数平方千米[11]; 时间:通常按天记录信号[11] |
| 合成孔径雷达干涉监测 | 硬件:干涉式合成孔径雷达[17]; 软件:地表形变反演算法 | 空间:毫米级分辨率,可以覆盖1×104 km2 [11]; 时间:由搭载雷达的卫星访问周期决定, 通常以天为时间间隔[11] |
| 全球导航卫星系统监测 | 硬件:卫星、信号接受站 软件:地表形变反演算法 | 空间:毫米级分辨率,可以覆盖全球[11]; 时间:可以持续观测 |
1.1.1 近地面涡度协方差监测
Lewicki等[34]通过现场试验验证了涡度协方差法在评估泄漏位置和量化泄漏量方面的能力。试验在美国蒙大拿州Bozeman的一处农田中进行,在试验期内CO2从浅层水平井中连续释放[34]。运用涡度协方差法估算的释放率(0.32 t/d)与实测释放率(0.30 t/d)的误差约7%[34]。一旦探测到泄漏,涡度协方差法测量的CO2通量和构建的足迹函数的最小二乘反演可以用于评估泄漏位置[34]。Lewicki等[34]的试验结果揭示,涡度协方差法可以探测并确定中等程度以上的泄漏信号与泄漏位置。Lewicki等[41]开发了一种设计涡度协方差监测网络的方法来提升CO2泄漏信号监测的准确性,使用监测网络推断CO2表面通量的分布与使用站点之间的关系,进而绘制CO2泄漏通量的时空分布图。权衡各个涡度监测站点的数量与位置,结合多个通量塔建立监测网络,是扩大CO2通量监测的空间幅度、提高地表CO2泄漏位置评估能力的重要手段[41]。
1.1.2 差分吸收激光雷达监测
1.1.3 无人机遥感监测
无人机遥感监测速率快、效率高,在油气管道监测领域已有了普遍应用实践,在实践中学者们发现该技术的重点不仅在无人机构造的设计,更需要关注监测路径与算法的设计[47⇓⇓⇓⇓-52]。Park等[52]通过激光传感过程获取管道中泄漏气体的浓度,通过红外传感获取管道的热图像信息,开发了一种气体泄漏和管道外观无人机远程实时监测系统,能够高效、准确地监测和诊断管道泄漏、管道腐蚀和裂缝。李器宇等[51]介绍了中国西南和西北地区无人机遥感监测管道安全的实例,提出无人机遥感监测在油气管道巡检中具有很好的应用前景。Yan等[50]为了实现油气管网无人机检测的综合优化,提出了一种新的混合整数非线性规划模型,并通过1个虚拟管网和1个实际管网验证了模型。目前,无人机巡检在部分国家已经进入商业化应用,无人机可以定期在井场、管道、地质封存区进行图像识别与数据采集,并通过大数据分析发现风险,减少人工成本的同时改善工作环境和条件[53-54]。
1.1.4 合成孔径雷达干涉技术
合成孔径雷达干涉技术已运用在阿尔及利亚In Salah CO2强化采气示范项目中[11,16,19,56⇓ -58]。In Salah项目的监测结果显示,3口注入井上方地表都产生了抬升,抬升速率平均3 mm/a [11,16,19,56⇓ -58]。利用地质力学模型,将合成孔径雷达干涉技术监测的地表形变进行反演,揭示出CO2沿断层/裂缝运移的迹象[11,16,19,56⇓ -58]。美国Kelly Snyder油田CO2提高采收率项目运用合成孔径雷达干涉技术测量了流体注采过程发生的地表形变,结果显示2007年1月至2011年3月间地表抬升了10 cm[25]。中国靖边CO2提高采收率项目运用合成孔径雷达干涉技术测量了地表形变,结果未见明显的规律性抬升或沉降趋势[26]。加拿大Aquistore碳封存项目在超过6.5 km2的范围部署了9个合成孔径雷达干涉技术的反射器,用于测量地表形变[27]。目前多个研究机构正在研究运用合成孔径雷达干涉观测数据与地质力学模型实现对CO2地下流动过程的反演[57]。
1.1.5 全球导航卫星系统监测
1.1.6 高光谱影像
1.2 定位与数据传输
地理定位的精确性对于碳封存项目泄漏位置的确定至关重要[11]。监测数据的高效传输是实现实时、智能化碳封存监测的关键技术,并为及时分析与决策提供依据。地理定位和数据传输分别主要通过全球导航卫星系统和物联网技术实现。
1.2.1 全球导航卫星系统
全球导航卫星系统(GNSS)指覆盖全球的用于导航与定位测量的卫星系统,其利用卫星信号传输实时信息,通过地面接收设备接收信息并计算得到地理位置信息[60]。目前常用的GNSS包括美国的GPS、俄罗斯的Glonass、欧洲的Galileo和中国的北斗(COMPASS)系统。
1.2.2 物联网技术
1.3 数据管理与决策支持
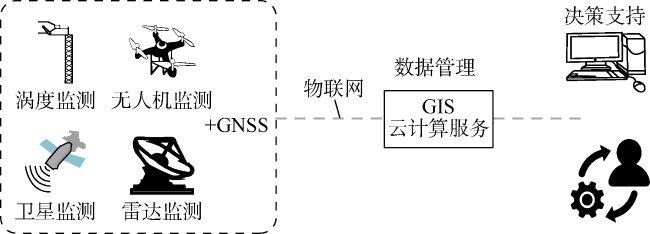
碳监测数据的有效管理是实现不同类型监测数据结合和智能化数据处理的重要环节,为高效决策提供支持。数据管理与决策支持由地理信息系统和云计算服务辅助实现。不同来源的监测数据结合全球导航卫星系统的定位信息,通过物联网技术整合到地理信息系统,进而运用云计算服务进行数据处理(见图2 )。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1.3.1 地理信息系统
1.3.2 云计算服务
2 空间信息技术在CO2地质封存监测中面临的挑战
空间信息技术可以兼顾实时、大范围和长周期的监测需求,不同空间信息技术具有不同的技术优点和挑战(见表3 )。总体而言,空间信息技术在数据的准确获取、数据的高效处理以及不同监测技术的协同方面依然面临挑战。
表3 不同空间信息技术的技术优点与技术挑战 |
| 技术名称 | 技术优点 | 技术挑战 |
|---|---|---|
| 涡度协方差监测 | 测量的空间范围大,并且可以提供连续测量数据[11] | 测量数据量大,需较大存储空间(数据收集频率为10 Hz或20 Hz); 需要有效的数据处理方法来确定泄漏位置和泄漏量,并且CO2通量的自然时空变化对CO2泄漏信号的探测有一定影响[11,31] |
| 差分吸收激光雷达监测 | 相对成本较低,并且易于移动[11] | 自然时空变化对CO2泄漏信号的探测有一定影响[11] |
| 傅里叶变换红外监测 | 可以同时监测多种气体组分[17] | 温度、湿度和其他气象条件会对测量的准确性造成影响[17] |
| 可调谐半导体激光监测 | 可采用手持式仪器进行方便、灵活的监测[17] | 可准确探测浓度的距离短[23] |
| 拉曼激光雷达监测 | 所需仪器少、成本低[17] | CO2的拉曼回波非常弱,难以从背景光波中提取出来[17] |
| 温室气体激光层析成像 | 能够监测和可视化大气CO2浓度的实时变化, 是一种自动化监测技术,有助于降低环境监测成本[11] | 需要对激光信号进行去噪、校正等处理, 对信息处理设备与算法要求较高 |
| 无人机遥感监测 | 监测速度快、效率高,可以减少人工成本[47⇓⇓⇓⇓⇓⇓-54] | 监测范围较小 |
| 卫星光谱监测 | 监测范围广,无需现场设备[17] | 低分辨率(1~10 km)条件下易受到气溶胶的干扰[17] |
| 高光谱影像 | 监测范围广 | 被动光学遥感反演精度较低,受反演模型影响较大; 主动遥感发展时间较短,技术成熟度较低 |
| 合成孔径雷达干涉监测 | 可以用于监测大范围的毫米级的地表形变[11] | 在地形条件复杂、植被覆盖率较高与土地利用率较高的 地方可能出现较大误差[11] |
| 全球导航卫星系统监测 | 可以用于监测大范围的毫米级的地表形变[11] | 对反演算法要求较高 |
| 全球卫星导航系统定位 | 将CO2传感器与GNSS接收器结合可以实时 准确确定特定地点的CO2浓度[29] | 对设备要求较高 |
| 无线传感器网络 | 可实现远程感应与控制,提升监测效率、准确性、 经济性,并且减少人的参与[63] | 易受到干扰,保密性差 |
| 地理信息系统 | 可以将不同来源的空间数据进行整合,有助于 数据的空间分析[15] | 需要定期对系统进行维护与更新 |
2.1 监测数据的准确获取
监测数据的准确获取是空间信息技术有效应用的前提。硬件的设计与选择直接决定了监测结果的准确度与精度。监测目的、传感器的搭载平台以及碳封存的场地特征都会影响空间信息技术设施装置的选择与安装。针对不同的监测目的以及不同的搭载平台(如不同高度的无人机或卫星),需要选择具有合适精度的传感器。针对不同的监测场地,需要选择与其相匹配的空间信息监测技术。有些遥感技术对温度、湿度和其他气象条件非常敏感(如傅里叶变换红外监测技术),因此不适用于气象条件快速变化的碳封存场地。针对碳封存场地的空间特征,需要选择与其相适应的设备安装方法。例如,合成孔径雷达干涉技术适用于地形平坦、植被少、土地使用少的地区,因此在植被覆盖量大的区域需要搭建永久的反射镜来实现准确的数据获取[11]。对于海底碳封存,由于搭载平台的限制和海水的阻隔,在陆地得到普遍实践的监测技术(涡度协方差法、无人机遥感技术等)无法在海底碳封存监测中应用。目前,海底碳封存监测的方式主要为声纳遥感(单波束扫描声纳、多波束声纳、合成孔径声纳等),通过判别水体和气体之间的声阻抗差异实现海底CO2封存泄漏监测[65]。
监测点位的设置也会影响监测数据获取的准确性。涡度协方差法监测CO2通量时,需要建立多个监测塔,形成监测网络,才能最大化保障CO2通量数据的空间分布准确性,实现对泄漏位置的精确定位。
2.2 监测数据的高效处理
空间信息监测数据的有效利用建立在数据精确高效处理的基础上,包括对监测站点环境基线值的正确使用、较为精确的反演算法以及对不同来源数据的高性能存储和计算。
监测数据分析过程中,需要将碳封存过程中的监测数据与项目实施以前的环境基线数据协同分析,消除自然时空变化对CO2泄漏信号的影响。
空间信息技术的分析过程通常依赖于反演算法。涡度协方差法测量的CO2通量需要通过足迹函数的最小二乘反演来评估泄漏位置[34]。合成孔径雷达干涉技术和全球导航卫星系统的地表形变监测也需要通过反演算法得到CO2在地下的分布情况。因此需要建立准确的反演算法。
空间信息监测数据往往来自于多个不同类型的监测技术,每种监测技术所产生的数据量也非常大,并且是由遥感科学、地理信息科学等交叉形成的大规模数据体。因此,针对大量不同数据类型,建立有效的数据存储与计算能力是空间信息监测数据高效处理的关键。时空大数据处理分析面临的挑战主要来自于数据的大规模和多样性。海量的数据需要强大的计算和存储资源进行处理。数据质量不一,可能包含不准确、不完整和带有噪声的信息,影响对数据的准确分析。因此,对不同来源的时空数据(具有不同的数据格式和坐标系统)进行整合是一个复杂的问题。时空数据的可视化需要专业的设计,以考虑时间和空间的复杂性。分析时空数据通常需要应用复杂的数学和统计模型,以考虑时间和空间之间的关联。长期存储和备份数据也需要合适的存储设备和策略。
2.3 不同监测技术的协同
空间信息技术作为一种新兴的监测技术,其数据的准确性以及结果的可信度需要与目前成熟的监测技术进行交互验证,为其大规模应用提供基础。不同监测技术的协同是空间信息技术有效应用的重点。
碳封存项目中应用的监测技术有十余种,每种技术测得的结果尚未建立互通的标准,无法直接协作。在一些项目中,虽然采用了多位一体的监测技术,但技术选取缺乏具体理论依据,仅是简单的尝试并选择较优方案,在过程中增加了不必要的人力和物力成本。解决这一问题需要建立统一的标准,以促进各种监测技术的协同作业,从而提高监测结果的可信度和准确性。
3 空间信息技术在CO2地质封存监测中的发展展望
3.1 建立空间信息技术监测方案优化设计方法与标准
在空间信息技术选择方面,亟需针对不同监测目的和不同碳封存场地特征,建立不同空间信息技术选取的指南,并且对不同的空间信息技术建立监测点位设计的方法与标准,优化监测点位选取及监测强度设计技术与方法,为空间信息监测技术的大规模推广应用奠定基础。
在空间信息技术监测数据应用方面,需要建立空间信息技术监测数据在碳埋存量核算中的应用方法,为碳埋存项目进入碳市场提供有效信息。
3.2 建立跨尺度监测技术的协同应用方法
在空间信息监测数据准确性评价方面,需要在地理信息系统的基础上,将获取的数据与不同尺度空间信息技术获取的数据进行交互验证,保障空间信息技术在规模化应用过程中的数据准确性。
在空间信息监测数据应用方面,通过跨尺度监测技术的协同应用,实现基于空间信息监测数据对地面甚至地下数据的有效反演。
在不同监测技术协同应用方面,需建立适应不同尺度监测数据的通信协议,为跨尺度监测技术的协同应用提供基础保障,形成跨尺度监测技术协同应用的设计方法与标准,实现空间信息技术与其他监测方法的高效、低成本协同应用。
3.3 形成空间信息技术与人工智能和高性能计算技术协同应用
在数据存储方面,结合人工智能与高性能计算技术,形成针对空间信息监测数据的多源数据融合及传输技术,建立大样本数据分布式存储及可视化平台。
在数据处理方面,将空间信息监测数据与人工智能、CO2封存泄漏及迁移转化数值模拟等相结合,构建全域多环境反演模型,建立目标地质体的数字孪生系统,形成泄漏风险预测大模型,针对潜在的泄漏风险建立智能化预警平台。
3.4 加快空间信息技术在中国碳封存项目中的应用
在总结国外空间信息技术应用案例经验的基础上,在中国碳封存项目中尽快针对成熟度较高的技术开展适应性评价与应用,构建国产化和自主化的空间信息技术监测装备,降低技术应用成本。
在空间信息技术监测数据处理与分析方面,建立国产化和自主化的工业软件,综合利用油藏数值模拟和数字孪生技术,构建针对中国陆相沉积地质体特征的反演算法,形成空间信息技术智能化数据处理与分析平台。
加强中国油气田企业与信息技术类公司、北斗卫星导航系统供应商等空间信息技术上下游企业的合作,寻找恰当的商业模式和项目运营模式,形成优势互补的创新联合体,推进空间信息技术在碳封存监测领域相关企业的协同发展。
4 结论
空间信息技术是CO2地质封存监测的重要手段,目前在CO2封存监测领域应用的空间信息技术主要有涡度相关法、遥感技术、地理信息系统、物联网技术和全球导航卫星系统等5类。CO2地质封存监测过程中的监测数据获取主要通过近地面涡度协方差监测、差分吸收激光雷达监测、无人机遥感监测、合成孔径雷达干涉、全球导航卫星系统监测、高光谱影像监测等实现,可以解决大规模长时间监测的问题,其监测数据可以与反演算法、油藏数值模拟等方法结合,实现对泄漏位置和CO2地下流动过程的评估;CO2地质封存监测过程中的定位与数据传输主要通过全球导航卫星系统和物联网技术实现,可实现更大覆盖范围的高效数据传输和监测点的精准定位;CO2地质封存监测过程中的数据管理与决策支持主要通过地理信息系统和云计算服务实现,将监测数据与地理信息相结合进行分析,可提升监测准确性与监测效率。
空间信息技术在碳封存监测中面临的挑战主要包括:针对不同监测目的、不同搭载平台以及不同监测场地,需选取与其相匹配的空间信息技术,保障监测结果的准确度与精度;针对空间信息监测数据来源广、数据量大的特点,需建立有效的数据存储与计算能力,保障数据的高效分析与处理;空间信息技术需要与目前成熟的监测技术进行交互验证,促进协同作业。
未来需建立空间信息技术监测方案设计方法与标准,建立跨尺度监测技术的协同应用方法,形成空间信息技术与人工智能和高性能计算技术协同应用,实现多种监测数据互补统一、信息交互可视、泄漏地点精准定位、监测高效智能、预测预警准确及时。此外,需加快空间信息技术在中国碳封存项目中的应用。